Multi-Path Interference
If you haven't already read how the Styku S100 sensor works, it would be a good idea to read this article first:
How the Kinect sensor captures a body in 3D
While a time-of-flight sensor like the Kinect produces high quality and accurate data that we use to create 3D body scans, it is sensitive to reflections in the environment. When there is something reflective in the infra-red spectrum of light too close to the turntable, it can cause issues with the way the 3D body scan is captured.
Examples of reflective objects in the IR spectrum include of course mirrors and highly polished metal, but also walls with glossy paint, bright white colored walls, walls made of plaster that haven't been painted, and glass doors. All of these can cause issues with the Kinect sensor if they are too close to the turntable and in the view of the sensor tower.
Learn more about environmental issues here
Issue 1 : Reflections on the turntable can cause distortions in the feet and ankles of subjects, and can make it hard for the scanner to determine where the "ground" is, causing scans to fail.
It's easy to see when there are too many reflections on the turntable because it will appear black in the scanning view.
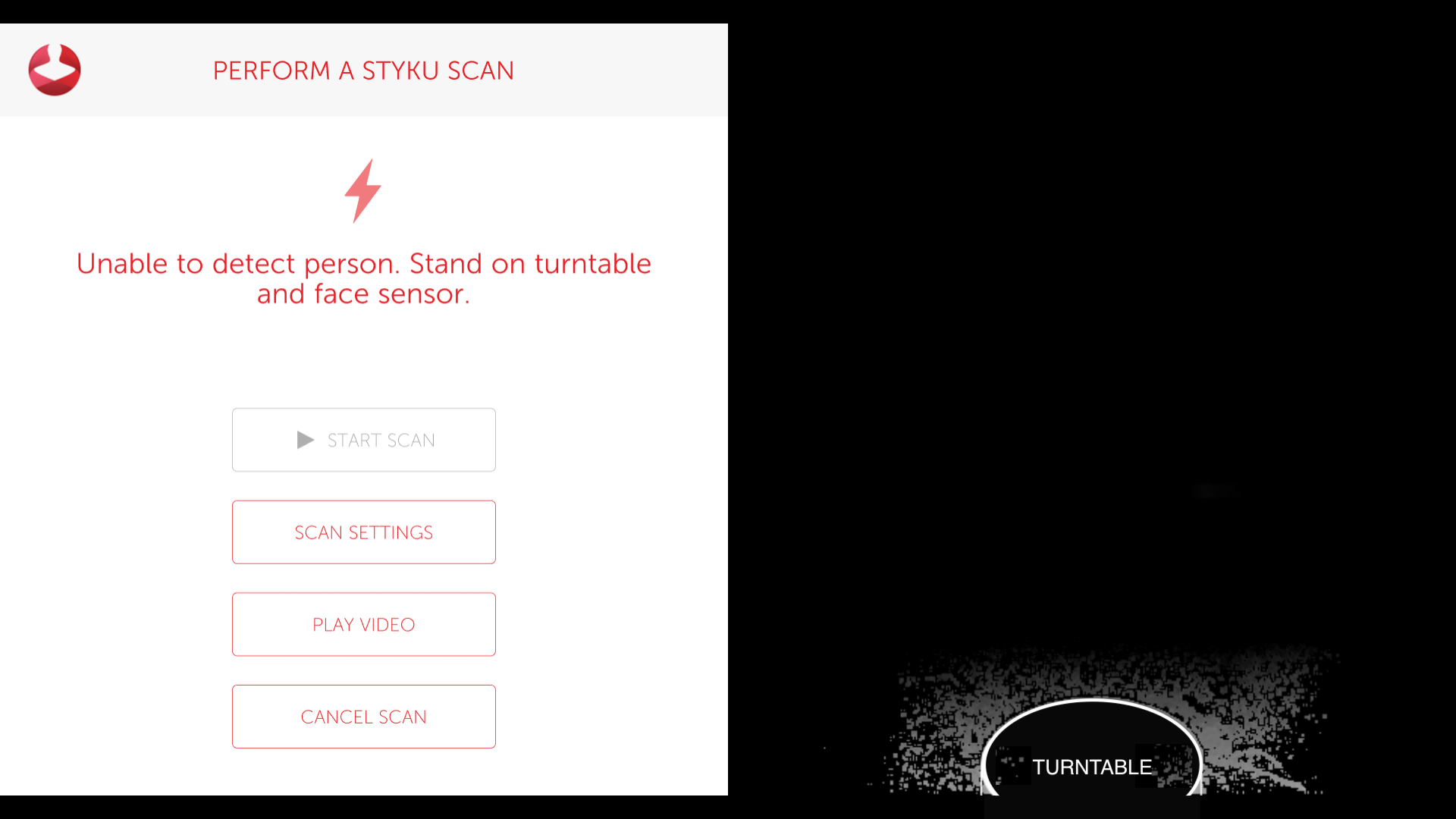
When this happens, the ankles and feet of the subject look smaller than in real life, and if there is too much distortion, the scans can fail to be created at all.
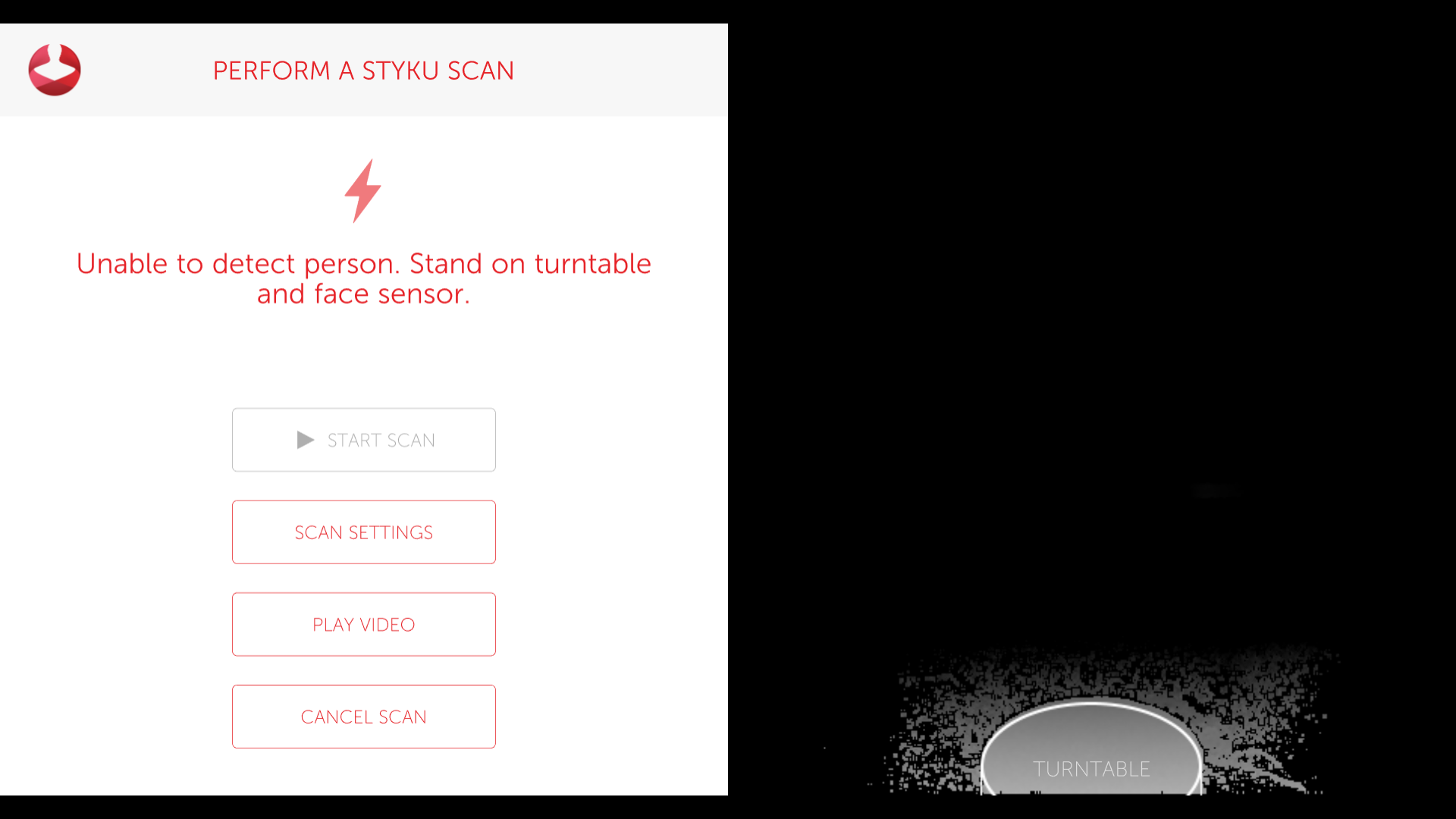
Fix 1 : Move the Styku scanner further away from light colored walls or other objects. The turntable should appear mostly grey in the scanning view, not black.
Issue 2 : Scanning with the sensor tower pointed at a corner of a room can cause all of the body measurements to be systematically smaller than they should be.
The Styku scanner expects there to be a flat, neutral colored wall behind the scan subject, about 2-5 feet away. If you have a corner of the room behind the subject, you will find that all of the measurements of the body will be smaller, because the light coming from the sensor will bounce not just off of the body, but off of the surrounding walls as well.